CAN frame
The CAN data frame is used to transmit the data, for error protection and to control the access procedure to the CAN bus. The entire data frame consists of several data fields and can have a total length of up to 130 bits. The advantage of such a short data frame is the faster response time to communication requests from prioritized ECUs.
There is the standard CAN data frame, which has an 11-bit long identifier field (CAN-2.0A), and the extended CAN data frame with a 29-bit identifier field (CAN-2.0B).
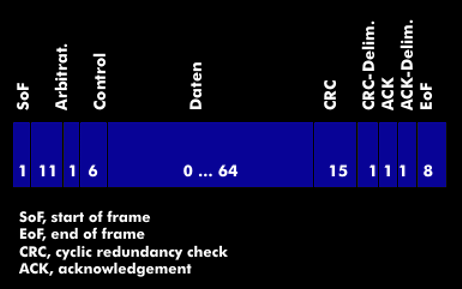
The CAN frame starts with a synchronization bit that identifies the beginning of the frame, Start of Frame (SoF), from which the stations derive the clock signal. In the standard frame, the following arbitration field consists of an 11-bit identifier field and a control bit, the Remote Transmission Request (RTR). Since the CAN data frame does not use source and destination addresses, all ECUs can check whether the information on the CAN bus is relevant for them. This information is in the identifier field and shows what kind of information it is. For example, the oil or water temperature of the engine, the engine speed or the amount of fuel injected. The actual value is in the data field. In addition, the priority of the control unit is entered in this field, which determines the access control. All stations constantly check whether the message in the Identifier field is relevant to them or whether another station with a higher transmission priority is transmitting.
In the following control field of 6 bits, the number of bytes that the data field comprises is entered. Two of the six bits are reserved, the length of the data in bytes is entered in the other four.
With the CRC field for the cyclic block check, Cyclic Redundancy Checksum (CRC), transmission errors can be detected and the ACK field is the confirmation field in which the number of receiving stations that have received the message without errors is entered. The End of Frame (EoF) data field concludes the CAN data frame
Data frame of CAN-FD
CAN-FD with flexible data rate has an extended data frame compared to the standard CAN data frame. The extended data frame has a flexible payload of 12, 16, 20, 24, 32, 48 or 64 bytes (512 bits) and three additional bits in the control field: Extended Data Length( EDL), which indicates whether it is a CAN or a CAN-FD frame, the Bit Rate Switch (BRS), which automatically switches to the higher data rate, and Error State Indicator( ESI), which indicates error states in a CAN-FD node. The data length of the payload is realized by the four bits long data field Data Length Code( DLC).