autonomous driving (AD)
Autonomous driving is characterized by several development stages, from assisted driving, in which the driver keeps an eye on the traffic and adapts his driving behavior to the traffic situation, through the various stages of partially or highly automated driving, to autonomous driving. These development stages are defined in the six SAE levels defined by the Society of Automotive Engineers(SAE ).
The development of autonomous driving is inextricably linked to the continuous advancement of driver assistance systems. At the lower SAE levels, the driver is in control of the vehicle and is supported by only a few driver assistance systems, if any. Only with partial automation and highly automated driving can the driver hand over the driving task to the driving system at short notice. However, he must be able to take control of the vehicle at any time.
The next highest SAE level, 4, is fully automated driving, in which the driver can relinquish control of the vehicle and the vehicle acts completely independently. And at the highest SAE level 5, autonomous driving or autonomous vehicle, the vehicle can drive fully autonomously to its destination without intervention from a vehicle occupant.

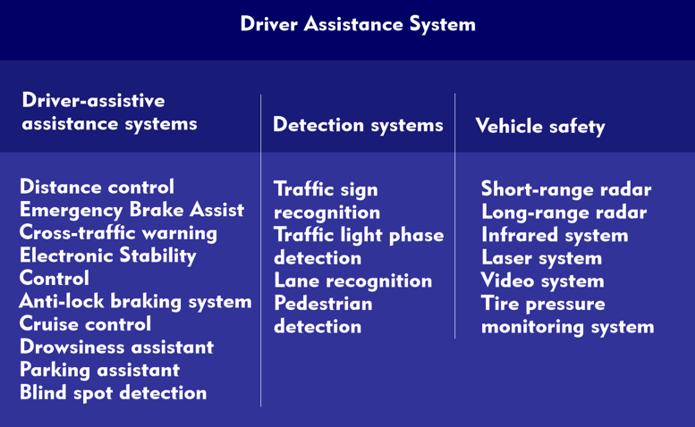
The development of the autonomous driving vehicle is an extremely complex task that primarily involves recognizing and assessing the traffic situation and who is involved: cars, trucks, buses, motorcycles, pedestrians, animals, moving objects, etc. The basis for the development of the autonomous driving vehicle is the recognition systems developed so far that work with object recognition. And, above all, the techniques of artificial intelligence.
When assessing a traffic situation, the light and visibility conditions play a decisive role. The red of a traffic light phase must be clearly distinguished from a red brake light. Similarly, changing neon signs must not impair the view of traffic signs or traffic lights. In the case of glare, the lighting conditions are completely different from those of clear visibility, so that the detection systems cannot detect oncoming, oncoming, overtaking, crossing or transversing vehicles without any doubt in the case of glare. These examples can be continued at will.