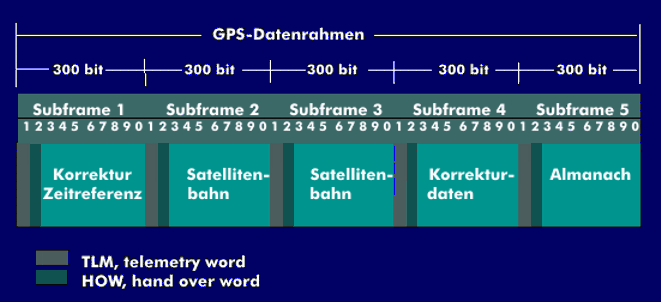
Der GPS-Datenrahmen besteht aus mehreren Frames, die kontinuierlich gesendet werden und die Korrekturdaten für die Empfänger-Zeitreferenz, die Bahndaten, Korrekturdaten und das Almanach enthalten.
Der gesamte GPS-Datenrahmen besteht aus mehreren Subframes, die jeder für sich aus 10 Datenwörtern bestehen. Ein solches Datenwort umfasst 30 Bit und dauert bei einer Datenrate von 50 bit/s 0,6 s. Daraus folgt die Länge eines Subframes mit 300 Bit und einer Übertragungsdauer von 6 s. Das Frame selbst besteht wiederum aus 5 Subframes und dauert 30 s. Und das gesamte GPS-Datensignal besteht wiederum aus 25 Frames, 37.500 Bit und benötigt bei der niedrigen Übertragungsrate von 50 bit/s eine Übertragungszeit von 12,5 Minuten.
Zur GPS-Positionsbestimmung wird die Impulsfolge der empfangenen GPS-Frames grafisch dargestellt und auf dem Display des GPS-Empfängers durch Verschiebung zur Deckung gebracht. Die Verschiebung dieser Impulsfolge ist ein Maß für die Signallaufzeiten und die Satellitenpositionen im Verhältnis zum GPS-Empfänger. Über diese Signallaufzeiten errechnet der GPS-Empfänger den genauen Standort, der gespeichert und fortlaufend aktualisiert wird.