Unter Freiheitsgraden, Degrees of Freedom (DoF), versteht man die Anzahl an Richtungen in der eine dreidimensionale Grafik im Raum verschoben und die Anzahl an Drehachsen in denen das Objekt gedreht werden kann. In der Robotik handelt es sich um die Bewegungsmöglichkeiten der Roboterarme
Freiheitsgrade von dreidimensionalen Grafiken
Bei den Freiheitsgraden gibt es die Bezeichnungen 3DoF und 6DoF. Bei 3DoF kann die Darstellung in drei Achsen geändert werden, wohingegen bei 6DoF das Objekt auch in drei Drehachsen gedreht werden kann. Entsprechende Freiheitsgrade spielen in der virtuellen Realität eine wichtige Rolle. So messen VR-Brillen, die 3DoF unterstützen nur die Kopfausrichtung, dagegen messen VR-Brillen für 6DoF auch das Roomscaling, bei dem sich der Betrachter im freien Raum bewegen kann.
Freiheitsgrade von Roboterarmen
Bei Roboterarmen sind die Freiheitsgrade abhängig von der Anzahl an Robotergelenken. Das Verhältnis von Robotergelenken zu Freiheitsgraden ist zwar nicht 1:1, aber je mehr Gelenke ein Roboterarm hat, desto umfangreicher sind dessen Freiheitsgrade.
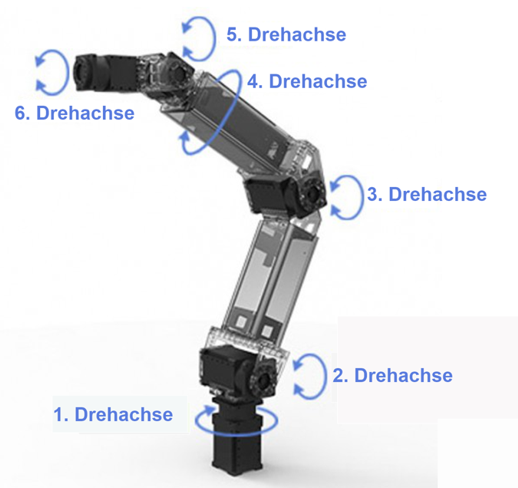
Die Freiheitsgrade eines Manipulators können sich nach kartesischen oder rechtwinkligen Koordinaten ausrichten. Kann der Roboterarm nach kartesischen Koordinaten bewegt werden, dann entspricht dies der Ost-West-, Nord-Süd- oder Oben-Unten-Richtung und einer Drehbewegung. Bei der Bewegung nach den kartesischen oder rechtwinkligen Richtungen geht es um die Bewegungen in X-, Y- und Z-Richtung. Je nach Anzahl an Drehgelenken können Manipulatoren vier, fünf oder auch sechs Freiheitsgrade in ihren Bewegungen haben.
Die Form des Arbeitsbereichs, als Roboter Space bezeichnet, entspricht einem rechteckigen Raum.