pedestrian detection (automotive) (PD)
In traffic engineering, pedestrians are the most vulnerable road users and also the ones most difficult to detect by driver assistance systems. This is due to their different clothing, their movement and, last but not least, their different size.
Pedestrian detection works with digital cameras, pattern recognition and optical flow analysis. The systems must be able to detect and recognize both standing and walking or running pedestrians, people who are close and others who are further away.
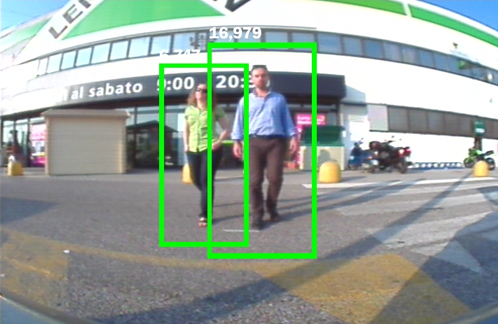
Depending on the system resolution, small people or children may be represented with only a few pixels, depending on the distance. In addition, fast-moving pedestrians must be detected within a very short time, and often in urban areas at driving speeds where the environment is constantly changing for evaluation. In addition, pedestrian detection systems must be able to detect pedestrians in daylight, in poor visibility conditions, and at night.
One method for pedestrian detection is Histogram of Oriented Gradients (HOG), in which pedestrian detection uses comparison images and videos to recognize human body shapes and motion patterns.