time of flight (sensor) (ToF)
Time of Flight (ToF) is a time-of-flight technique used in radio-based and radar-based tracking techniques and in 3D sensing. In this technique, the distance between the transmitter and the object is determined from the time of flight between the transmitter and the object. The time-of-flight method is also used to detect 3D objects in 3D cameras.
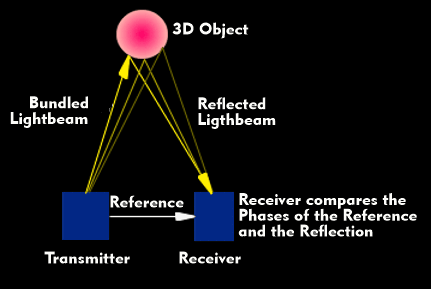
In the ToF method used in 3D cameras, the 3D object is determined by the reflection and time-of-flight differences triggered by individual object points. In terms of procedure, the ToF method works with a bundled light beam - this can be infrared light( IR), a laser pulse from a laser sensor or a radar beam - which is emitted by a transmitter and scans the 3D object point by point.
The reflection of the light beam is received by a receiver unit, which takes the time-of-flight difference between the reflected light signal and a reference signal received directly from the transmitter and uses this to determine the phase shift that occurs between the emission and reception of the IR signal. ToF methods can work with laser pulses and use the round trip time of the reflected pulse to determine the distance, or with radio signals and use the phase difference between the transmitted and reflected radio signal to determine the distance for each individual object point. In addition, the position can be calculated using the change in the radiation angle of the radio or light beam, and the object can be displayed as a 3D model.
The time-of-flight oriented ToF method is implemented in PMD sensors, Photonic Mixer Device (PMD). In addition to the classic ToF method, there is also the Direct Time of Flight( DToF), which is used in lidar systems in automotive technology in driver assistance systems, in pedestrian collision warning systems for the detection of pedestrians, of motor vehicles and other objects, and also as an attention assistant for monitoring the driver.