location accuracy
In the context discussed here, position or location accuracy stands for the accuracy of positioning and navigation systems. A characteristic value for the accuracy specification is the CEP value, Circular Error Probable (CEP). The position accuracy corresponds to the specified deviation from the actual position in meters. A position is clearly defined by the coordinates in a coordinate system.
The coordinate system used for geographic positioning describes the exact position by the longitude, latitude and altitude. Other coordinate systems are Earth Centered, Earth Fixed (ECEF), Universal Transverse Mercator( UTM) and Military Grid Reference System (MGRS).
Satellite Navigation
In general, position accuracy is dependent on navigation technology and the associated positioning. As far as position accuracy is concerned, satellite navigation has the highest accuracy. The positioning accuracy depends on the number of satellites received and the navigation device. The accuracy values depend on satellite fluctuations, atmospheric influences, weather effects and signal reflections and, in the case of the GPS system, are in excess of 10 meters. This accuracy, indicated by the Position Dilution of Precision( PDOP), can be increased to less than one meter by correction data. However, this accuracy is not available to all users because operators distinguish between private and commercial users and provide poorer positioning accuracy to private users than to the U.S. military.
For civilian use, the positioning accuracy with the Standard Positioning Service( SPS) is about 10 m, while the military accuracy with the Precision Positioning System( PPS) is less than 1 m. The resolutions planned for the European Galileo system are to be 15 m in the Open Service and 1 m in the Commercial Service( CS).
A significant increase in positional accuracy down to the centimeter range is achieved with the Global Navigation Satellite System( GNSS). This technology is used, for example, in direct georeferencing( DG) for the precise positioning of aerial photographs.
Mobile radio navigation
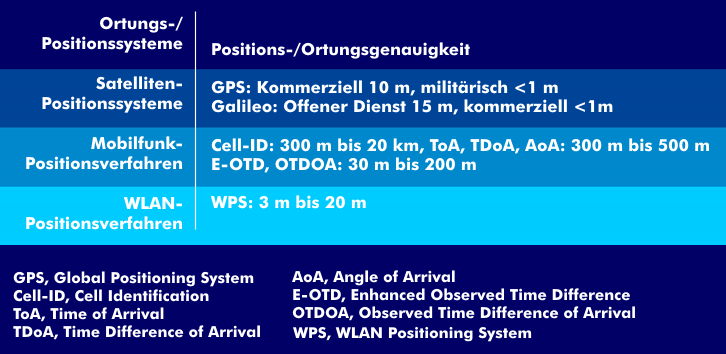
Mobile radio navigation is less accurate than satellite navigation and depends on the technical procedure and the size of the radio cell. The simplest positioning method uses cell identity( CI). With this method, the size of the radio cell has a direct impact on the positioning accuracy. For this reason, the accuracy of small radio cells can be as high as 300 m, but for large cells it can be as high as 20 km. Time- and angle-based methods such as Time of Arrival( ToA), Time Difference of Arrival( TDoA) or Angle of Arrival( AoA) also only achieve accuracy values of between 300 m and 500 m. Only with hybrid methods such as Time of Arrival (ToA) combined with Timing Advance( TA) or Cell Identity (CI, Cell-ID) in combination with the distance-dependent Timing Advance (TA) or Timing Advance (TA) in combination with Angle of Arrival (AoA) and Cell Sector (CS), better values can be achieved, as well as with Enhanced Observed Time Difference( E-OTD) and Observed Time Difference of Arrival (OTDOA). With the latter methods, position accuracies of 30 m to 200 m are achieved.
There are various methods for improving position accuracy. These include Automotive Dead Reckoning( ADR) and Untethered Dead Reckoning( UDR), which correct the position from the GNSS location determination and a current location determination.