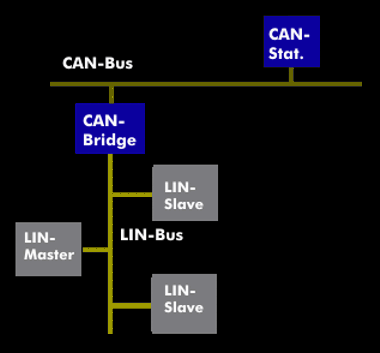
Der LIN-Bus ist ein preiswertes, flexibles Sensor-Aktor-Netzwerk, das in der Automotive-Technik Sensoren und Aktoren und deren Steuergeräte auf der Feldebene miteinander vernetzt und als Subbus mit einem leistungsfähigeren Feldbus, wie dem CAN-Bus, verbunden ist.
Der LIN-Bus ist ein Ein-Draht-Bus, er ersetzt die aufwendige Verdrahtung von Sensoren und Aktoren mit einem CAN-Steuergerät. Dadurch kann die I/O-Funktionalität des CAN-Steuergerätes auf die LIN-Slaves verteilt werden. Er erfüllt die Spezifikationen der SAE-Klasse "A". Das LIN- Protokoll wurde erstmals im Jahre 2000 auf einem amerikanischen Kongress vorgestellt.
Wie die meisten Feldbusse arbeitet der LIN-Bus im Master-Slave-Betrieb und überträgt die Daten über ein einadriges Kabel, an das alle LIN-Komponenten - LIN-Master und LIN-Slaves - angeschlossen sind. Die Kabellänge, die Kapazität des Kabels und der Übertragungspegel sind definiert.
Da alle angeschlossenen LIN-Stationen gleichberechtigt sind, steuert der LIN-Master die Zugangsberechtigung der einzelnen LIN-Slaves auf das Übertragungsmedium. Beim Zugangsverfahren wird nacheinander jedem einzelnen LIN-Slave ein Zeitschlitz für die Übertragung zur Verfügung gestellt. Dadurch ist die Latenzzeit vorhersagbar.
Der LIN-Bus arbeitet ebenso wie das CAN-Protokoll mit einem speziellen Nachrichten-Identifier. Dieses Identifier-Feld enthält die wichtigsten Informationen der Steuergeräte und tritt auch anstelle der Quell- und Zieladressen, die es im LIN-Datenrahmen ebenso wenig gibt wie beispielsweise im CAN-Datenrahmen. Die Kommunikation ist Multicast oder Broadcast, wobei jedes LIN-Steuergerät die Informationen über die LIN Description File ( LDF) erhält. Die Datenraten des LIN-Busses sind sehr moderat und betragen 9,6 kbit/s und 19,2 kbit/s, sowie 10,4 kbit/s; der Signalpegel auf dem Eindrahtbus liegt bei 12 V. Ein typischer LIN-Bus hat 16 LIN-Stationen, wobei die LIN-Master den LIN-Bus steuern und mit den LIN-Slaves kommunizieren. Die LIN-Slaves sind Mikrocontroller für die Ansteuerung von Sensoren und Aktoren, wie beispielsweise einem Fensterheber oder Wischermotor.
Um den LIN-Bus möglichst preiswert realisieren zu können, hat man die Slaves ohne umfangreiche Funktionseinrichtungen ausgestattet und sie über den Bus synchronisiert.