Das Tauchspulenmikrofon ist ein Mikrofon, das nach dem elektrodynamischen Prinzip arbeitet, bei dem ein Leiter in einem permanenten Magnetfeld bewegt wird und dadurch Strom in den Leiter induziert wird.
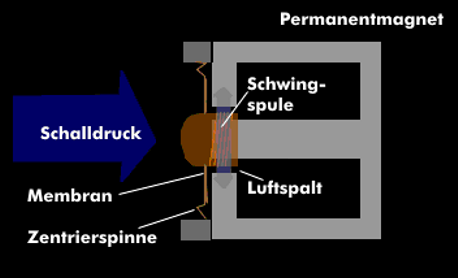
Wie aus der Bezeichnung Tauchspulenmikrofon hervorgeht, taucht bei diesem Mikrofon eine Schwingspule in ein magnetisches Feld. Die Spule, die mit der Membran verbunden ist, befindet sich in einem Luftspalt und wird durch eine Zentrierspinne zentriert, damit sie sich im Luftspalt frei bewegen kann und nicht an die Wände des Permanentmagneten stößt. Sobald Schalldruck ( Pa) auf die Membran trifft, bewegt sich die Schwingspule im Luftspalt des Magnetfelds proportional zur Frequenz des auftreffenden Schalldrucks und erzeugt mittels Induktion eine Spannung. Diese errechnet sich aus dem Produkt der Geschwindigkeit (v) der Membran bzw. der Schwingspule, der magnetischen Induktion (B) und der Leiterlänge (l) der Spule. Bei einer angeschlossenen Nennimpedanz von 200 Ohm ergibt sich aus dem Strom eine Spannung von etwa 1 mV/Pa bis 3 mV/Pa, was einer Empfindlichkeit von ca. -75 dB entspricht. Der Frequenzbereich von Tauchspulenmikrofonen liegt zwischen 30 Hz und 20 kHz.
Tauchspulenmikrofone werden nach der Membranfläche in Groß- und Kleinmembranmikrofone klassifiziert. Die Membrangrößen liegen bei 1", 1/2", 1/4", etc.

Bedingt durch die Masse der Tauchspule ist die Bewegung bei höheren Frequenzen gedämpft, was sich in einem frequenzabhängigen Frequenzgang bemerkbar macht, bei dem die höheren Frequenzen eine verringerte Empfindlichkeit haben. Die Frequenzgangkurve hat bei niedrigen Frequenzen ein Maximum und fällt dann relativ linear bis zu den höchsten Frequenzen. Zur Kompensation von Störmagnetfeldern haben Tauchspulenmikrofone eine zweite Spule.
Die Vorteile von Tauchspulenmikrofonen liegen in deren Robustheit und der Aufnahme hoher Schalldrücke. Nachteilig sind das schlechte Impulsverhalten und der stark abfallende Frequenzgang.