Ein Controller Area Network ( CAN) ist ein von der Internationalen Standardisierungs-Organisation ( ISO) standardisierter echtzeitfähiger Feldbus für die serielle Datenübertragung in der Automotive-Technik, der Automation und Fertigungstechnik. Das CAN-Bussystem, das ursprünglich von Bosch für Kfz-Anwendungen entwickelt wurde, hat sich im Laufe der Zeit auch als Feldbus in der Automatisierungstechnik positioniert.
Aufbau und Topologie des CAN-Busses
Das CAN-Bussystem wurde für die Vernetzung von vielen Steuergeräten entwickelt. Es ist ein seriell arbeitender 2-Draht- Bus mit offener Multi-Master- Architektur. alle aktiven Komponenten sind Master, die passiven sind die Slaves. Das Übertragungsmedium ist ein TP-Kabel mit einer Impedanz von 120 Ohm. Bei den auf den beiden Leitungen liegenden Signalen handelt es sich um differenzielle Signale, die mit entgegen gesetzter Polarität übertragen werden. Andere Übertragungsmedium können vom Benutzer definiert werden. Von der Topologie her hat der CAN-Bus eine Linientopologie.
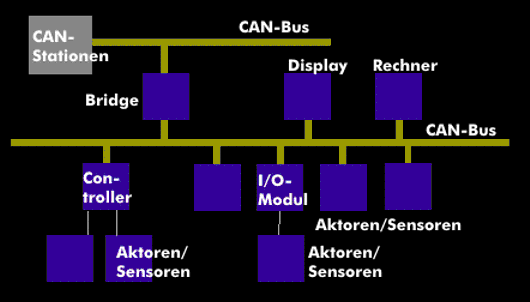
Alle Stationen sind direkt über einen Transceiver an den CAN-Bus angeschlossen. Als Stecker kommt dabei der 9-polige Sub-D-Stecker zum Einsatz. Weitere 4- und 5-polige Stecker sind ebenfalls definiert.
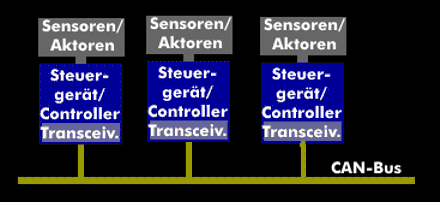
Die Stationen selbst bestehen aus einem Steuergerät und einem Controller, der den Zugang auf den Bus steuert. Da alle Stationen gleichzeitig am CAN-Bus angeschlossen sind, können sie alle für sie relevanten Daten empfangen. Da das gleichzeitige Senden von mehreren Stationen zu Kollisionen führen würde, benutzt der CAN-Bus ein prioritätengesteuertes Zugangsverfahren, das Arbitration. Die Daten werden dabei in den CAN-Datenrahmen verpackt, der zusätzliche Datenfelder für das Zugangsverfahren und die Fehlersicherung enthält.
Die Datentransferraten des CAN-Busses
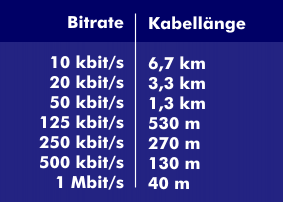
Die Datentransferraten des CAN-Busses sind abhängig von der Buslänge und reichen bis zu 1 Mbit/s bei Entfernungen von 40 m. Bei Buslängen von 1 km, die ohne Repeater und Bridge arbeiten, liegt die Übertragungsrate bei 80 kbit/s und bei sehr langen Bussen von bis zu 10 km reduziert sich diese auf ca. 7 kbit/s. Theoretisch ist die Teilnehmerzahl unbegrenzt; es gibt aber marktgängige Anschlusskomponenten mit denen 32, 64 und bis zu 128 Teilnehmer an den CAN-Bus angeschlossen werden können. Entsprechend des Anwendungen in der Automotive-Technik hat man zwei Versionen spezifiziert: CAN-B und CAN-C.
CAN-B unterstützt die Integration intelligenter Sensoren und ist die langsamere Version des CAN-Busses für die Karosserie- und Fahrzeugelektronik mit einer Datenrate von 83,3 kbit/s.
CAN-C hat die höheren Datenrate von 500 kbit/s und ist für Antriebs- und Fahrwerkelektronik. An einen CAN-B-Bus können 10 Stationen, an einen CAN-C-Bus 24 angeschlossen werden.
CAN-FD steht CAN Fexible Data Rate. CAN-FD hat eine höhere und flexible Datenrate als das klassische CAN-Protokoll. Der CAN-Datenrahmen hat einen variablen Payload von bis zu 64 Byte gegenüber 8 Byte beim Standard-CAN-Format.
Das CAN-Protokoll unterstützt das Multimaster-Verfahren des CAN-Busses, hat eine hohe Fehlertoleranz und eine leistungsfähige Fehlererkennung. Es kann in störungsbehafteten Umgebungen eingesetzt werden und bietet eine hohe Datenintegrität.
Mit dem CAN-Bussystem, das eine objektorientierte Adressierung hat, können leistungsfähige ereignisgesteuerte Systeme aufgebaut werden. In bestimmten Ausprägungen können die Daten direkt zwischen beliebig vielen Teilnehmern ausgetauscht werden.
Der CAN-Bus ist in den unteren beiden Schichten, der Bitübertragungsschicht und der Sicherungsschicht, standardisiert nach ISO 11898. In der darüber liegenden Übertragungsschicht wird das Zugangsverfahren und die Fehlererkennung abgearbeitet. Oberhalb der Übertragungsschicht befindet sich die Objektschicht, die die eine Nachrichtenfilterung anhand der Identifier- Informationen vornimmt, und darüber der CAN Application Layer ( CAL), in dem die Daten mit der Kennung bzw. der festgelegten Priorität versehen werden.